










Stau auf den Straßen ist Alltag für viele, ein Ausweg könnte einmal Individualverkehr über den Luftweg werden. Hoch über den Straßen sind die Wege flexibel und Reisende kommen schneller ans Ziel.
Am Standort Braunschweig des Deutschen Zentrums für Luft- und Raumfahrt (DLR) haben Wissenschaftler nun die Ergebnisse des EU-Forschungsprojekts myCopter vorgestellt. Ein Highlight ist die im DLR entwickelte myCopter-Lenkradsteuerung, mit der sich Drehflügler von morgen nahezu wie ein heutiger PKW steuern lassen. Zahlreiche weitere Fragen wie Kollisionsvermeidung, Schwarmflug oder Pilotenausbildung wurden im Rahmen des vom Max-Planck-Institut für biologische Kybernetik geleiteten Projekts untersucht, um mehr über die Möglichkeiten und Herausforderungen des individuellen Luftverkehrs für jedermann zu lernen.
Dabei galt es auch die Erwartungen potentieller Nutzer zu betrachten. Mit einer ersten Untersuchung möglicher gesellschaftlicher Auswirkungen leistet das myCopter-Projekt zusätzliche Pionierarbeit auf dem Gebiet des zukünftigen Individualverkehrs.
Intuitive Steuerung für myCopter
Im Fokus der Forscher standen grundlegende Technologien und Konzepte. Mit speziellen Fluggeräten, sogenannten Personal Aerial Vehicles (PAV), soll es in ferner Zukunft jedermann möglich sein, seine täglichen Wege durch die Luft zurückzulegen. Dafür muss die Steuerung für die Piloten effizienter und intuitiver gestaltet werden. "Die Handhabung zukünftiger PAVs für jedermann möglich zu machen, ist eine große Herausforderung, denn das Hubschrauberfliegen mit der heutigen komplexen Steuerung erfordert nach wie vor viel Training", sagt Prof. Stefan Levedag, Leiter des DLR-Instituts für Flugsystemtechnik.
"Nun ist es uns gelungen, eine Lenkradsteuerung mit dahinterliegender automatischer Steuerungstechnik zu entwickeln, die das Fliegen deutlich vereinfacht. Wir können das nicht nur für ein PAV nutzen, sondern auch andere Luftfahrzeuge damit verbessern." Eine spezielle Regelungstechnik unterstützt den Piloten bei der Steuerung des Fluggerätes. Das Erfahrungswissen des Autofahrers soll genutzt werden, um die Steuerung von Fluggeräten intuitiver zu gestalten. Ziel ist es, die Ausbildung zukünftiger PAV-Piloten deutlich zu vereinfachen.
"Der individuelle Luftverkehr hat das Potential eine wichtige Rolle im zukünftigen Verkehrssystem einzunehmen, unterstreicht Projektleiter Prof. Dr. Heinrich H. Bülthoff vom Max-Planck-Institut für biologische Kybernetik. "myCopter hat dazu beigetragen, entscheidende Technologien zu entwickeln, um PAVs in der Zukunft Wirklichkeit werden zu lassen."
Hubschrauber-Flugsimulator mit Lenkrad
"Aus vier mach drei" lautet die Idee des neuen Lenkrads für Hubschrauber. "Bisher muss ein Hubschrauberpilot alle vier Steuerachsen gleichzeitig im Blick behalten", erklärt Bianca Schuchardt vom DLR-Institut für Flugsystemtechnik. "Besonders im Schwebeflug erfordert das höchste Konzentration, wenn der Pilot beide Hebel und Pedale gleichzeitig bedienen muss, um stabil in der Luft zu bleiben."
Mit dem myCopter-Lenkrad fällt das zyklische Steuer weg, das für die Bewegung um die Längsachse (Rollen) und um die Querachse (Nicken) verantwortlich ist. "Stattdessen kann der Pilot mit der entsprechenden Drehbewegung des Lenkrads den Hubschrauber in die gewünschte Richtung fliegen", so Schuchardt weiter. Ein Hebel verbleibt ausschließlich für die Flughöhe. Alternativ kann diese auch über Schaltwippen am Lenkrad kontrolliert werden. Die Pedale kontrollieren wie beim Auto mit Gas und Bremse die Geschwindigkeit bis hin zum Verweilen im Schwebeflug.
Zudem ermöglicht ein Acht-Wege-Schalter am myCopter-Lenkrad den Rückwärtsflug sowie den Seitwärtsflug. Im AVES-Simulatorzentrum des DLR in Braunschweig hat das Lenkrad bereits seinen virtuellen Erstflug im Hubschrauber gemeistert. Im nächsten Schritt wird es auf dem DLR-Forschungshubschrauber EC135 ACT/FHS im realen Flug getestet.
Statt Stau zum Schwarmflug in der Luft
"Entscheidend ist es, das Hubschrauberfliegen für den Alltag umfassend zu vereinfachen und neben der Steuerung mit passenden Sensoren und Bildschirminhalten möglichst intuitiv für jedermann zu gestalten", sagt Projektleiter Bülthoff, der am Max-Planck-Institut für biologische Kybernetik zu diesen Fragen forschte. Weitere Projektpartner beschäftigten sich mit Fragen etwa nach der Koordinierung der zahlreichen Privatflieger oder nach der konkreten Ausbildung zukünftiger PAV-Piloten. Das flugdynamische Modell der PAVs und die Struktur des Trainings für die zukünftigen Privatpiloten war Thema der University of Liverpool.
Wissenschaftler der École Polytechnique Féderale de Lausanne indessen erforschten mit Hilfe unbemannter Fluggeräte die Themen Kollisionsvermeidung, Schwarmflug sowie automatische Landeplatzerkennung, während sich die Eidgenössische Technische Hochschule Zürich mit Kontrollstrategien für einzelne Fluggeräte und ebenfalls mit Starts, Landungen und der Navigation bei unbemannten Fluggeräten befasste. Das Karlsruher Institut für Technologie untersuchte die soziotechnologischen Aspekte des Projekts und damit, welchen Einfluss die Einführung von PAVs auf unsere Gesellschaft hätte.
Tunneldisplay als Routenplaner für optmalen Flugweg
Das DLR führt zudem Demonstrationen von ausgewählten, im Projekt entwickelten Technologien auf dem Forschungshubschrauber EC135 ACT/FHS durch. "Wir unterstützen die Entwicklung von flugdynamischen Modellen und entwickeln ein Highway-in-the-Sky-Display für individuelle Flugvehikel; eine Art intuitive Navigationshilfe für PAV-Piloten", erklärt Bianca Schuchardt. In einem Tunneldisplay werden dem Piloten visuelle Wegelinien eingeblendet, die den optimalen Flugweg vorgeben.
Das Projekt myCopter – Enabling Technologies for Personal Aerial Transportation Systems ist auf vier Jahre im Zeitraum von Anfang 2011 bis Ende 2014 ausgelegt und wird von der Europäischen Kommission im Rahmen des 7. Forschungsrahmenprogramms gefördert. Zu den Partnern gehören das Max-Planck-Institut für biologische Kybernetik (Projektleitung), die University of Liverpool, die École Polytechnique Féderale de Lausanne, die Eidgenössische Technische Hochschule Zürich, das Karlsruher Institut für Technologie und das Deutsche Zentrum für Luft- und Raumfahrt (DLR).
Das dürfte Sie interessieren:
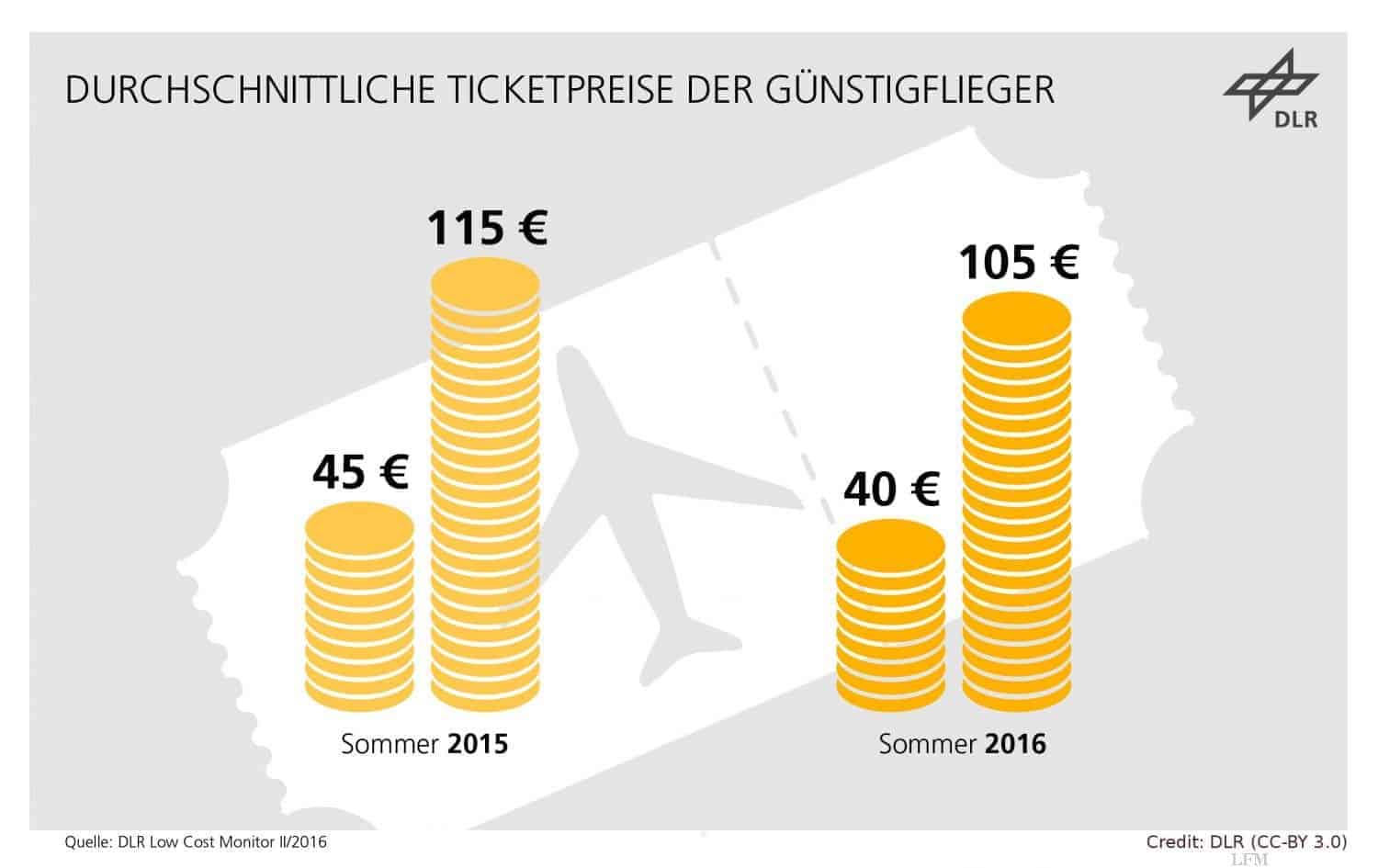
Ticketpreise bei Billigfliegern erneut gesunken

SunExpress: billiger fliegen bei Flexibilität

Solar-Segler um die Welt: DLR schließt Schwingungsversuche ab

Segelflug im Himalaya: Spezialkamera erfasst Gletscher in 3D

Schleppflugzeug geriet in Schieflage am Flugplatz Klix

NASA und DLR: Windvermessung in Europas Wetterküche
Lufthansa vereint ihre Flugschulen – Bedarf an Piloten steigt

Luft- und Raumfahrt-Rückblick beim DLR

Kanzler-Airbus A300 nun startklar als ZERO-G Parabelflugzeug



















{kind=link}