

")








Auf dem Mond und Mars werden gewaltige, kilometerlange Lavahöhlen vermutet, die sich vor Milliarden von Jahren durch vulkanische Aktivitäten gebildet haben. Sie sollen mit automatischen Fahrzeugen erkundet werden. Doch der Einsatz von Rovern in Höhlen ist bisher noch selten und eine äußerst herausfordernde Aufgabe für mobile Roboter.
Tunnel- und Höhlensysteme sind, speziell auf dem Mars, für die Wissenschaft von großer Bedeutung. Denn dort könnten sich Spuren von einstigem oder sogar vorhandenem Leben befinden. Für herkömmliche Rover sind die steilen, unwegsamen Kraterwände jedoch bislang unzugänglich. Mithilfe von „Scout“ wollen Wissenschaftler des Deutschen Zentrums für Luft– und Raumfahrt (DLR) Erkundungstechnologien für diese Lavahöhlen entwickeln.
Robuster Roboter für ferne Welten
Der Roboter Scout hat eine Größe von 105 mal 51 Zentimetern, ein Gewicht von 18 Kilogramm und eine Nutzlast bis sechs Kilogramm bei fünf Liter Volumen. Er erreicht eine Geschwindigkeit von 7,2 Kilometern pro Stunde. Dabei beherrscht er Stürze aus bis zu zwei Metern Höhe, Kopfüber-Fahrten und das Selbstaufrichten. Scout hat ein neuartiges, nachgiebiges Speichenrad und verformbare Rückenelemente, um Hindernisse zu überschreiten, die andere Rover nicht überwinden können. So überwindet er Hindernisse von bis zu 40 Zentimeter. Um den Rover aber für künftige Einsätze in Lavahöhlen auf dem Mars und Mond vorzubereiten, führte das DLR-Institut für Systemdynamik und Regelungstechnik mit dem Scout-Rover nun einen Test in einer irdischen Höhle in Bayern durch. Durch seine Robustheit ist der DLR-Rover Scout in der Lage, sich in diesem anspruchsvollen Terrain zu bewegen. Das macht ihn ideal für Explorationen auf Mars und Mond.
Mit ihrer Formenvielfalt bieten diese natürlichen Hohlräume eine sehr anspruchsvolle Umgebung. In der Höhle wurde der Rover auf Verbesserungspotenzial untersucht, das in den nächsten Prototypen einfließen wird. Im Test musste Scout eine 50 Meter Horizontaldistanz zurücklegen und dabei Steine, Stufen, Engstellen sowie einen kalten Bach überwinden. „Was an der Oberfläche nur ein Katzensprung ist, ist in Höhlen oft eine lange und beschwerliche Distanz“, berichtet Projektleiter Dr. Roy Lichtenheldt vom DLR-Institut für Systemdynamik und Regelungstechnik.
Ferngesteuert durch die Höhle
Der akkubetriebene und per Funk gesteuerte Scout benötigt keinerlei Kabel für den Betrieb, wodurch Außentests einfach umzusetzen sind. „Der Transport zum Testbereich in der Höhle hat dem Rover jedoch einiges abverlangt und ist vergleichbar mit mehreren, kurzen Stürzen auf hartem Gestein. Belastungen dieser Art können auch im realen Einsatz eintreten“, weiß Lichtenheldt. Um die Höhlenfauna nicht zu beeinträchtigen, wurde Scout auf dem Weg zu seinem Einsatzort von den Forscher transportiert.
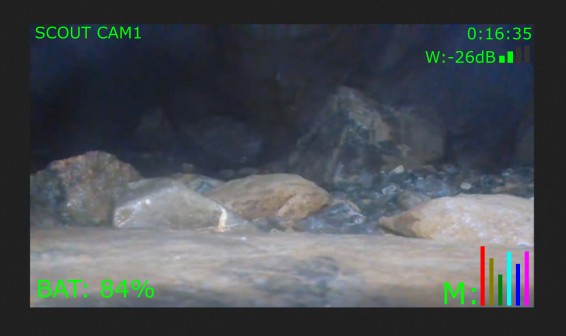
Am Einsatzort angelangt wurde der Rover von einem Kontrollstand, der mehrere Höhlenkammern entfernt war, gesteuert. Anhand der vom Rover erzeugten Bilder konnte der Operator Scout durch die enge und hindernisreiche Höhle manövrieren. „Trotz Hindernisse ist die Funkverbindung innerhalb der Höhle sehr stabil gewesen. Zukünftig werden wir diese noch zusätzlich mit Repeatern verbessern“, erklärt Lichtenheldt. Die spezielle Ansteuerung der Räder, die am DLR-Institut für Systemdynamik und Regelungstechnik entwickelt wurde, half den Rover sicher durch die Höhle zu bewegen.
Die aus dem Versuch gewonnenen Ergebnisse nutzen die Forscher, um neue Anforderungen an das System abzuleiten und wertvolle Informationen für die zukünftige Autonomie zu sammeln. Unter anderem wird Scout mit einer innovativen und stromsparenden Matrix-LED-Beleuchtung nachgerüstet. Im Höhlentest musste der Rover mit der gleichen Beleuchtung wie seine menschliche Begleitung „auskommen“.
Outdoor-Erfahrung nicht durchs Labor ersetzbar
Die abenteuerliche Anreise zum Einsatzort sowie den Test unter Realbedingungen hat Scout sehr gut bestanden. Da bei der Prototyp-Entwicklung die hohe Robustheit des Systems im Fokus lag, konnten dem Rover weder die Schläge beim Transport noch die hohe Feuchtigkeit in der Höhle etwas anhaben. Nach dem anspruchsvollen Versuch wies die Aluminium-Umhüllung des Rovers lediglich einige Kratzer und kleine Dellen auf. „Um die Stärken und Schwächen eines Systems auch aus konstruktiver Sicht feststellen zu können, sind solche Tests unverzichtbar. Die Erfahrungen die wir dabei machen unterscheiden sich oft sehr deutlich vom Laborbetrieb“, betont der DLR-Forscher.
Der Schutz des empfindlichen Ökosystems der Höhle hatte dabei stets die höchste Priorität. Entsprechend wurden die Tests auch außerhalb der Fledermausschutzzeit durchgeführt. Ehrenamtliche Höhlenforschende unterstützten das DLR-Team zudem tatkräftig mit ihrer Ortskunde, der Bereitstellung eines detaillierten Höhlenplanes sowie beim Materialtransport. In den kommenden Jahren soll Scout weitere Testfahrten in Höhlen absolvieren, um sich Stück für Stück an die reale Mission zu nähern. Aber auch für das Leben auf der Erde hat diese Raumfahrtforschung großen Nutzen: Auf der Erde kann das robuste System dann bei der Rettung von Verschütteten oder in der Agrarrobotik eingesetzt werden.















")


{kind=link}